|
CreOS SDK
The CreOS SDK allows you to interact with Avular robots
|

|
|
CreOS SDK
The CreOS SDK allows you to interact with Avular robots
|
|
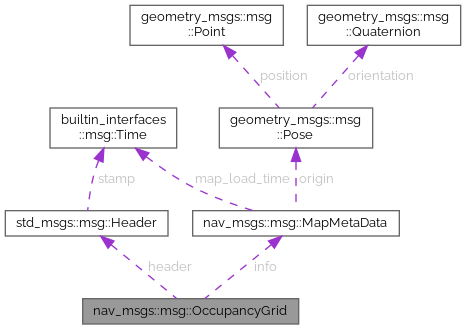
ROS message class definition for OccupancyGrid. More...
#include <nav_msgs/msg/occupancy_grid.hpp>
Public Attributes | |
| std_msgs::msg::Header | header |
| msg::MapMetaData | info |
| std::vector< int8_t > | data |
ROS message class definition for OccupancyGrid.
This represents a 2-D grid map