|
CreOS SDK
The CreOS SDK allows you to interact with Avular robots
|

|
|
CreOS SDK
The CreOS SDK allows you to interact with Avular robots
|
|
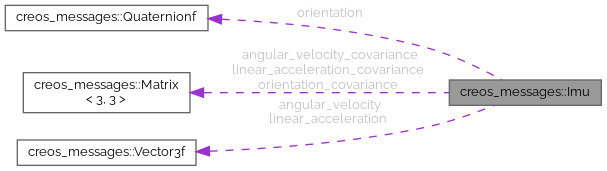
IMU message containing the orientation, angular velocity and linear acceleration. More...
#include <creos/messages/imu.hpp>
Public Member Functions | |
| auto | operator<=> (const Imu &other) const =default |
| Compare two IMU messages. | |
Public Attributes | |
| creos::RobotClock::time_point | timestamp |
| Timestamp of the IMU message. | |
| std::string | frame_id |
| Frame id of the IMU message. | |
| Quaternionf | orientation = {0, 0, 0, 1} |
| Orientation quaternion in the order (x, y, z, w) | |
| Matrixf< 3, 3 > | orientation_covariance |
| the covariance matrix of the orientation. Row major about x, y, z | |
| Vector3f | angular_velocity = {0, 0, 0} |
| Angular velocity in the order (x, y, z) [rad/s]. | |
| Matrixf< 3, 3 > | angular_velocity_covariance |
| the covariance matrix of the angular velocity. Row major about x, y, z | |
| Vector3f | linear_acceleration = {0, 0, 0} |
| Linear acceleration in the order (x, y, z) [m/s^2]. | |
| Matrixf< 3, 3 > | linear_acceleration_covariance |
| the covariance matrix of the linear acceleration. Row major about x, y, z | |
IMU message containing the orientation, angular velocity and linear acceleration.