|
CreOS SDK
The CreOS SDK allows you to interact with Avular robots
|

|
|
CreOS SDK
The CreOS SDK allows you to interact with Avular robots
|
|
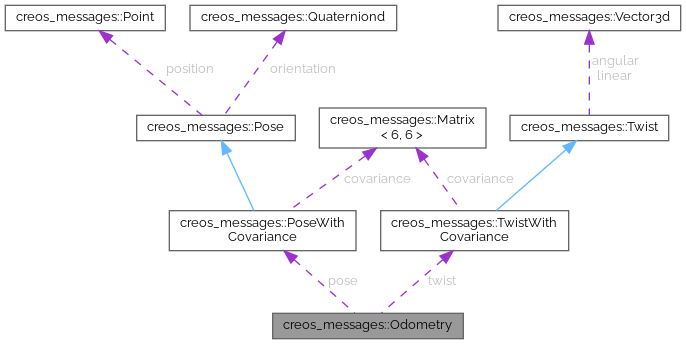
The Odometry message contains the estimated position, orientation and velocity of the robot. More...
#include <creos/messages/odometry.hpp>
Public Member Functions | |
| auto | operator<=> (const Odometry &other) const =default |
| Compare two Odometry messages. | |
Public Attributes | |
| creos::RobotClock::time_point | timestamp |
| Timestamp of the estimated position, orientation and velocity. | |
| std::string | frame_id |
| Frame id of the odometry. | |
| PoseWithCovariance | pose |
| Position and orientation of the robot. | |
| TwistWithCovariance | twist |
| Linear and angular velocity of the robot. | |
The Odometry message contains the estimated position, orientation and velocity of the robot.