Overview
Introduction
To understand how Vertex One works, it's essential to understand its architecture, its elements and the communication between them.
Architecture Overview
Below a schematic overview is shown how the Vertex One is built up internally.
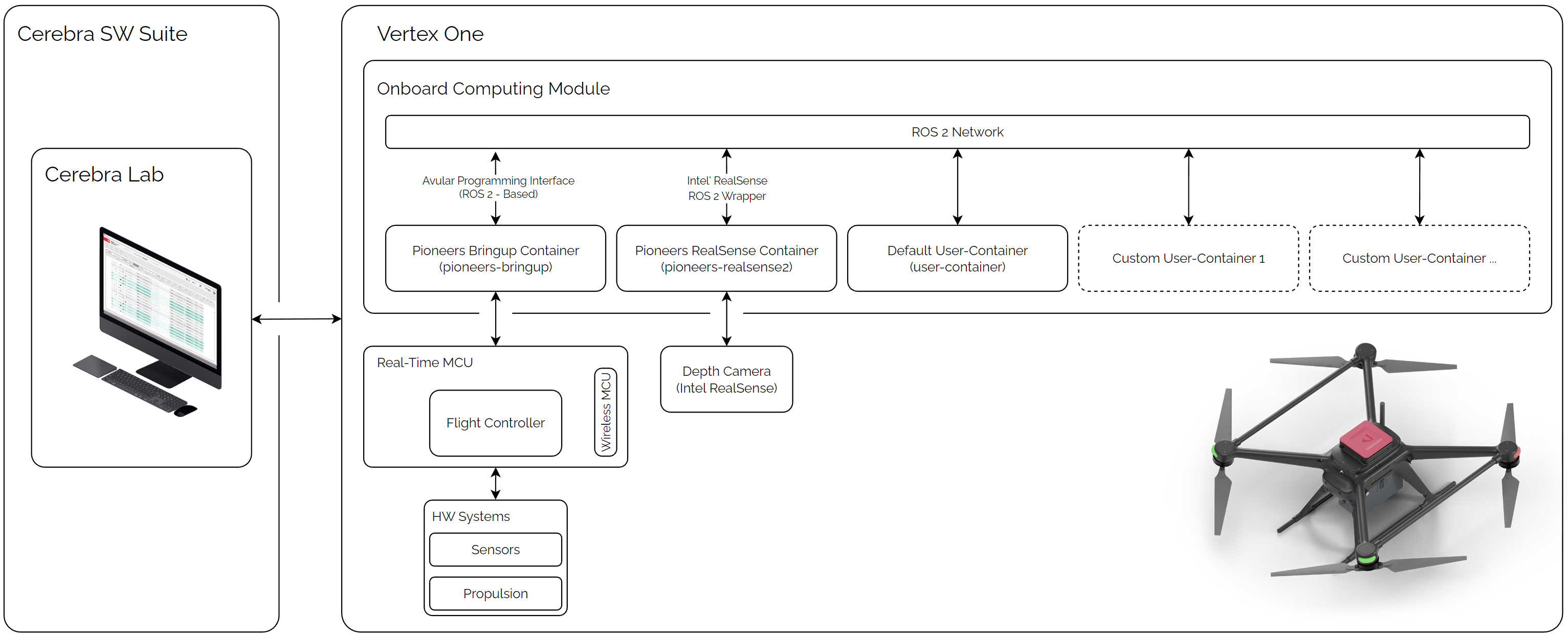
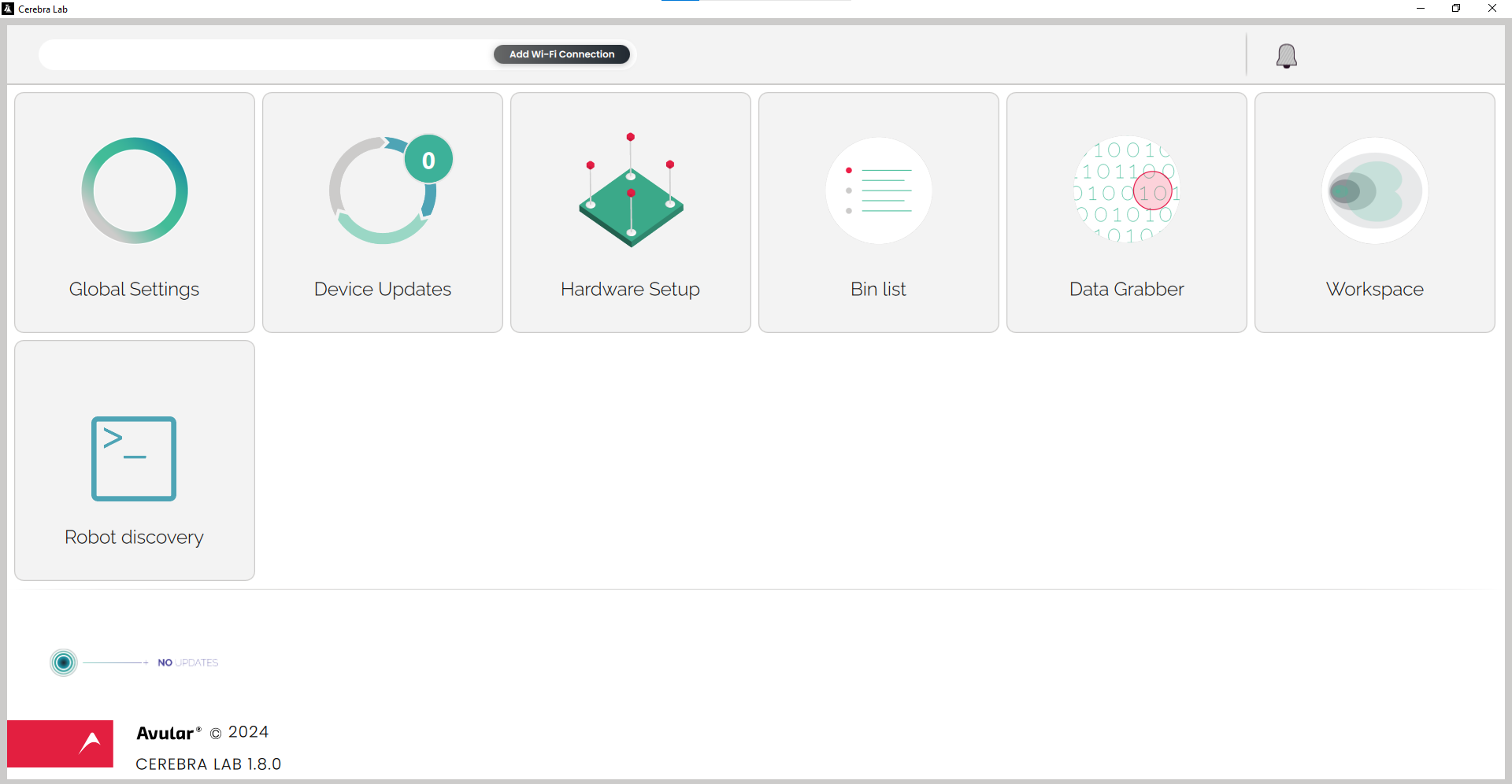
Cerebra Software Suite
Vertex One uses a powerful desktop application built to manage all Avular robots (incl. drones) called Cerebra Lab. It is used to connect to your robot, update it, stream and log data and includes live visualization GUI of the data such as signals, states and errors.
Onboard Computing Module
The onboard computing module of the Vertex One is an Nvidia Jetson Orin NX (see specification list). This onboard computing module runs Linux OS and it is pre-installed with Avular software which runs in docker containers. User can use a dedicated user container, create new containers, etc. Learn more about how to manage the containers.
Real-Time MCU
Flight controller is run by a dedicated real-time microcontroller that runs a real-time OS. The communication between the real-time MCU and the onboard computing module is handled by Avular and can be interfaced with using Avular Programming Interface.
All hardware systems of the Vertex One, i.e. propulsion and sensors are connected to this real-time MCU.