Flight Modes & Behaviour
Introduction
The Vertex One flight controller supports multiple flight modes. On top of that is contains pre-programmed flight behaviors such as automated take-off and landing. Status indicators on the body of the drone are used to inform the pilot about the flight controller's state and behavior. All these aspects will be explained in this section.
Flight Modes
The Vertex One supports the following flight modes:
- Manual position mode
- Automatic position mode
- Attitude mode
The flight modes can be selected on the remote controller. Options within the automatic mode can be selected through the Avular Programming Interface (API)
Manual Position Mode
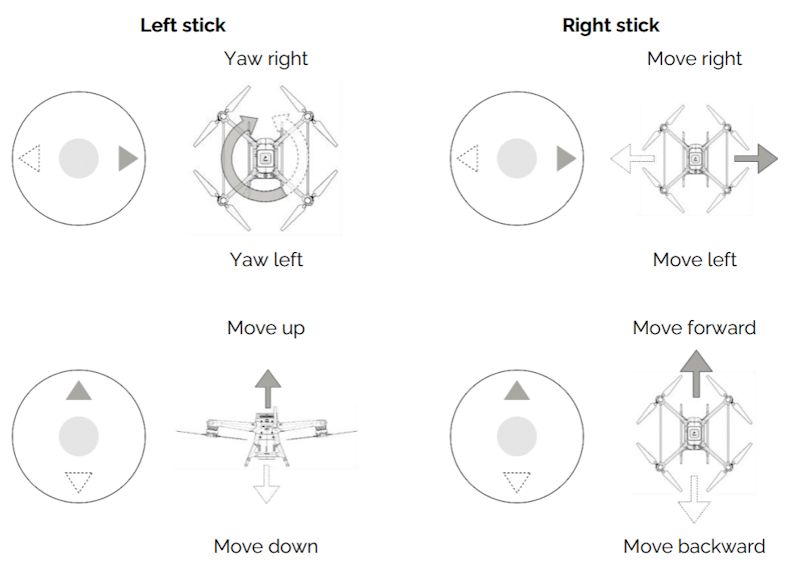
In manual position mode the Vertex holds its altitude and position. This is only available when GNSS position data is available. The pilot controls horizontal and vertical velocity through the RC as well as yaw rate. This mode is strongly recommended for a first flight with the Vertex One.
Automatic Position Mode
In Automatic mode the Vertex follows a trajectory reference as supplied to the flight controller via the Avular Programming Interface. This is only available when GNSS position data is available. The pilot can always take over control by switching back to manual position mode or attitude mode.
Attitude Mode
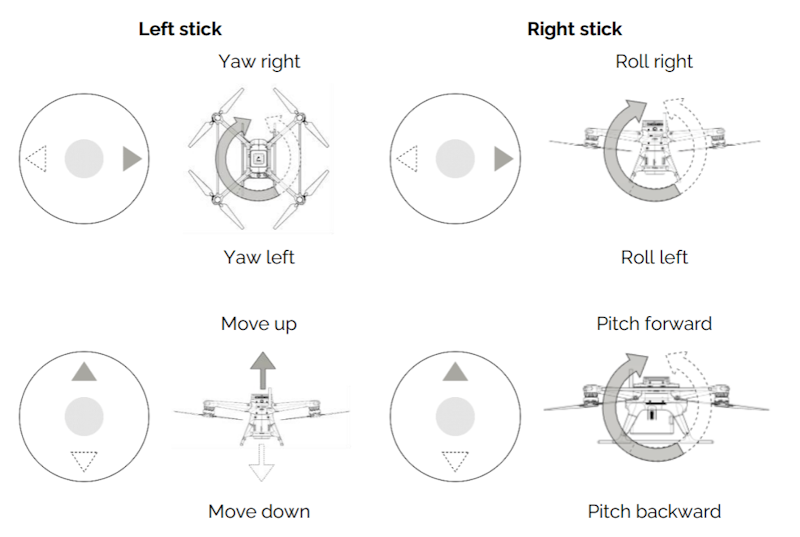
In Attitude Mode, the Vertex maintains its stable horizontal orientation, altitude, and heading. The pilot controls roll and pitch angles via the remote controller, as well as vertical velocity and yaw rate. This mode can result in drift if no input is provided from the remote controller. It should only be used if strictly necessary and by experienced pilots, or it can be activated in case of a failsafe action by the flight controller.
Flight Behaviour
Automated Take-off/Landing
The Vertex One has an automated take-off and landing sequence. The Pilot can trigger this via the RC or the Avular Programming Interface. During take-off the Vertex One will ascend to the specified take-off altitude (default: 0.6m).
Automated landing results in the Vertex One descending until it detects landing. The motors will automatically be disarmed after the landing is detected. The pilot can control the descent velocity while landing. Therefore the pilot can always increase altitude again while landing.
Fail-safe Behavior
The Vertex One can commence an emergency landing due to various conditions such as critical battery level, loss of the remote controller connection or sensor problems. The behavior is equal to a manual landing except the pilot cannot cancel landing or take-off again after landing. It is required to first reboot the Vertex. Determine and solve the cause of the emergency landing before attempting another flight.
Vertex States
The Vertex One has a double safety measure to prevent potentially unsafe situations by accidental spinning of the propellers. Before the flight can commence, the pilot will have to follow steps for the drone to go through the motors enabled state to the armed state. See the following diagram:
- After powering on the Vertex One, it is in the disarmed state; the status indicator on the body is red
- To enter the motors enabled state, double press the power button. The Vertex One is in the motors enabled state and the power button indicator is green.
- Now, the Vertex One can be armed by the remote controller as described in the RC documentation.
Status Indications
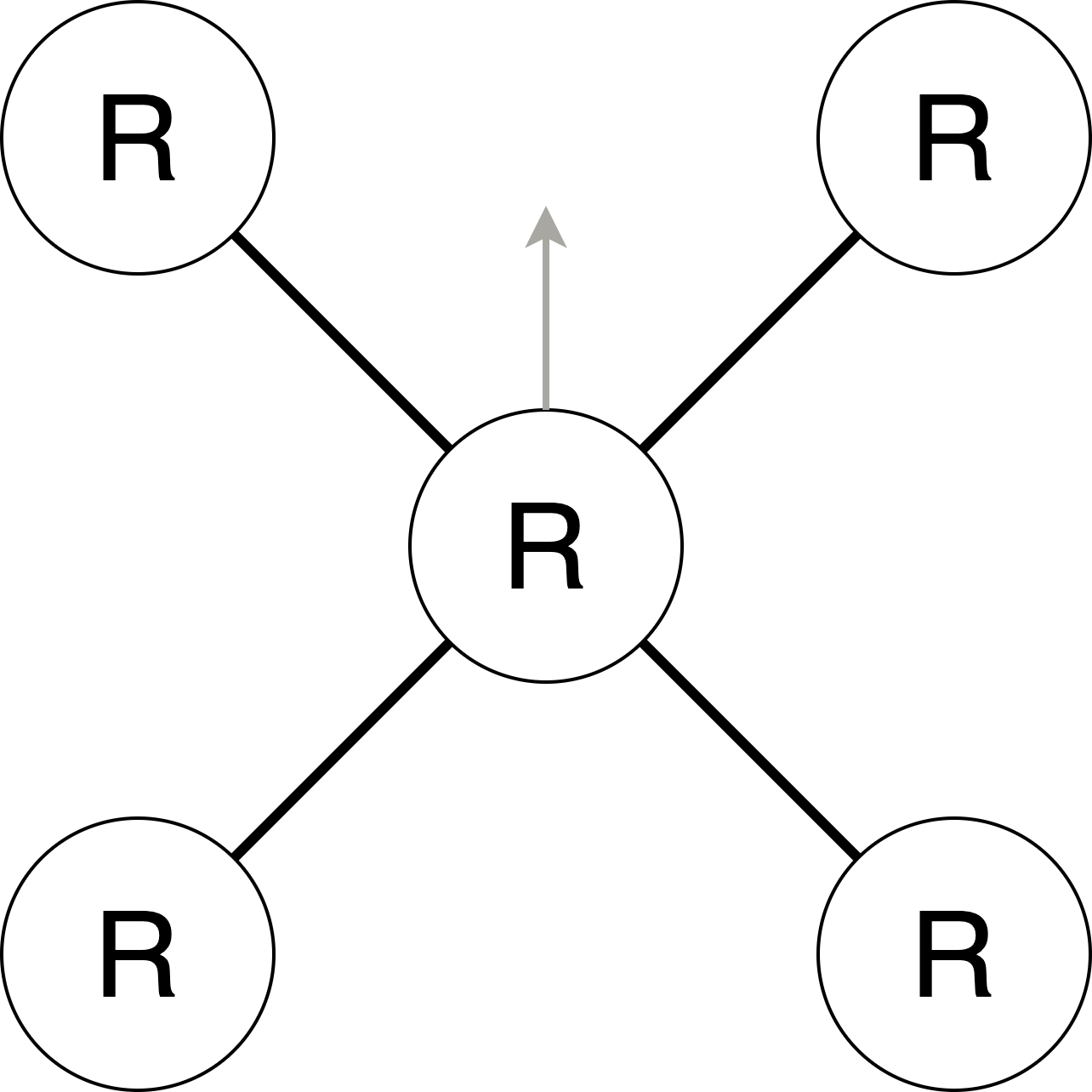
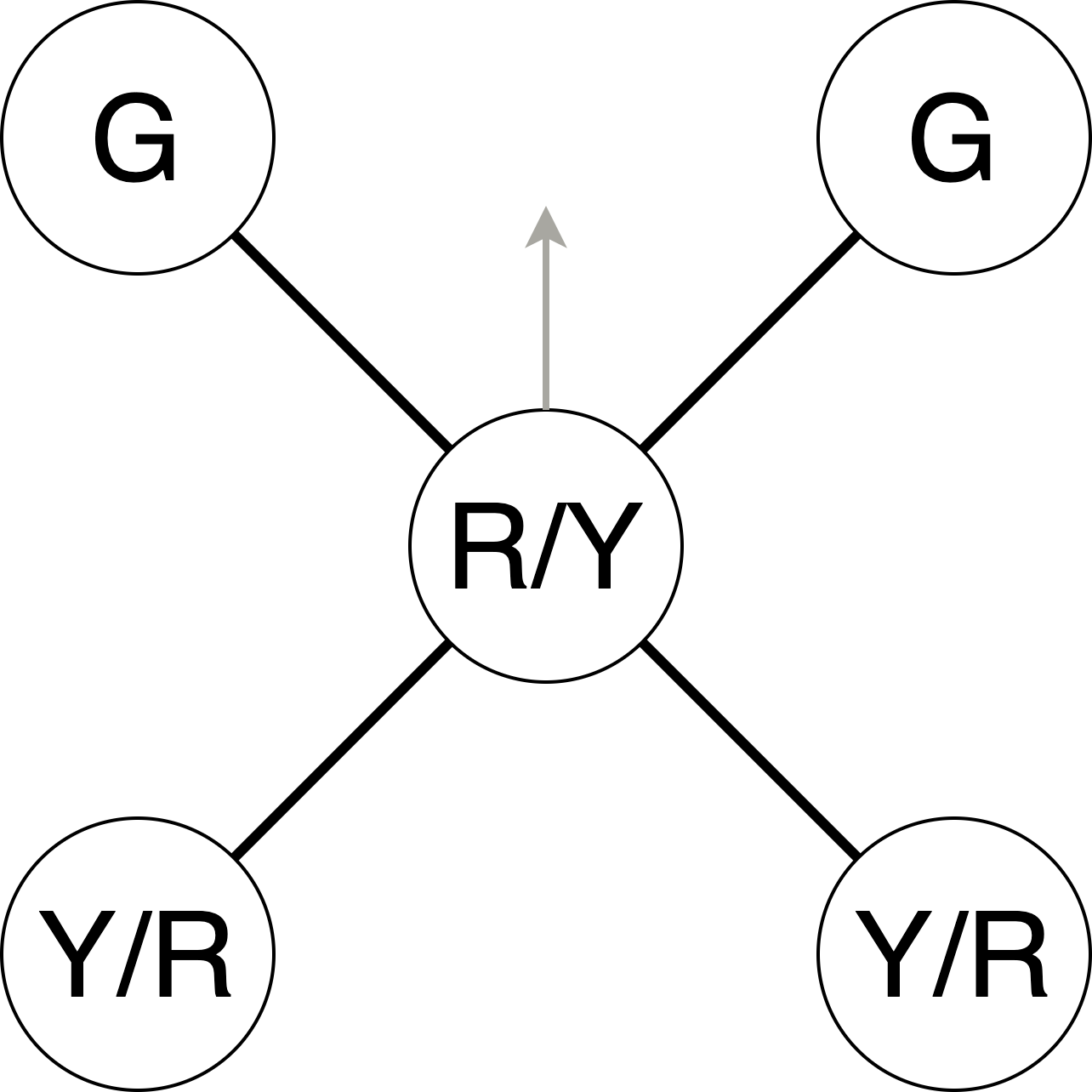
To inform the pilot about the status on the Vertex One, there are five light indicators: 4 Navigation lights and 1 Status indicator.
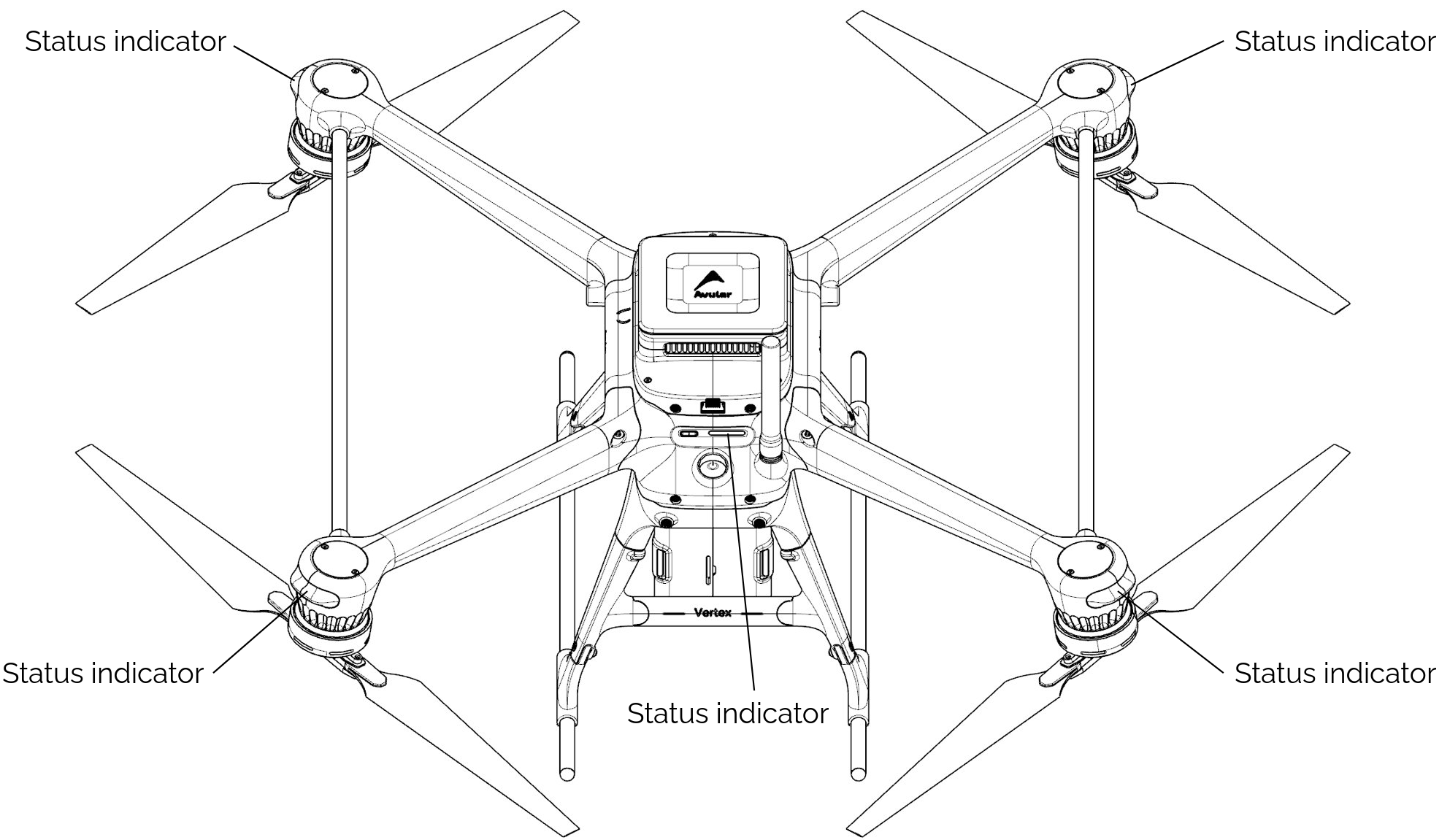
Please note, that the Navigation Lights are only available when Vertex One is powered by the PowerPack.
System Function
| Indication | Pattern | Function |
|---|---|---|
 |
Fluorescent Light Animation | Booting |
 |
Breathing Animation | Idle |
 |
Rotating Animation | Starting flight controller |
 |
Gradually Turning-off Animation | Shutting down Vertex One |
 |
Pulse Fade Animation | Updating firmware/flight controller |
 |
Slow Blinking | Error |
G = Green R = Red B = Blue Y = Yellow W = White P = Purple
Drone Disarmed
During disarmed states the center LED bar on the body displays the 'motors enabled' state. Double press the power button to change the state from motors disabled (red) to motors enabled (green) and vice versa.
| Indication | Pattern | Function |
|---|---|---|
 |
Solid | Initialization of flight controller. |
 |
Fading | Automated sensor calibration. Do not move the Vertex. |
 |
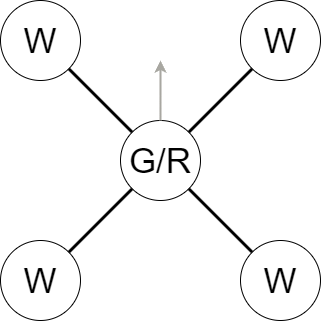
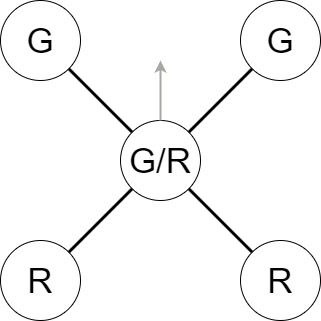
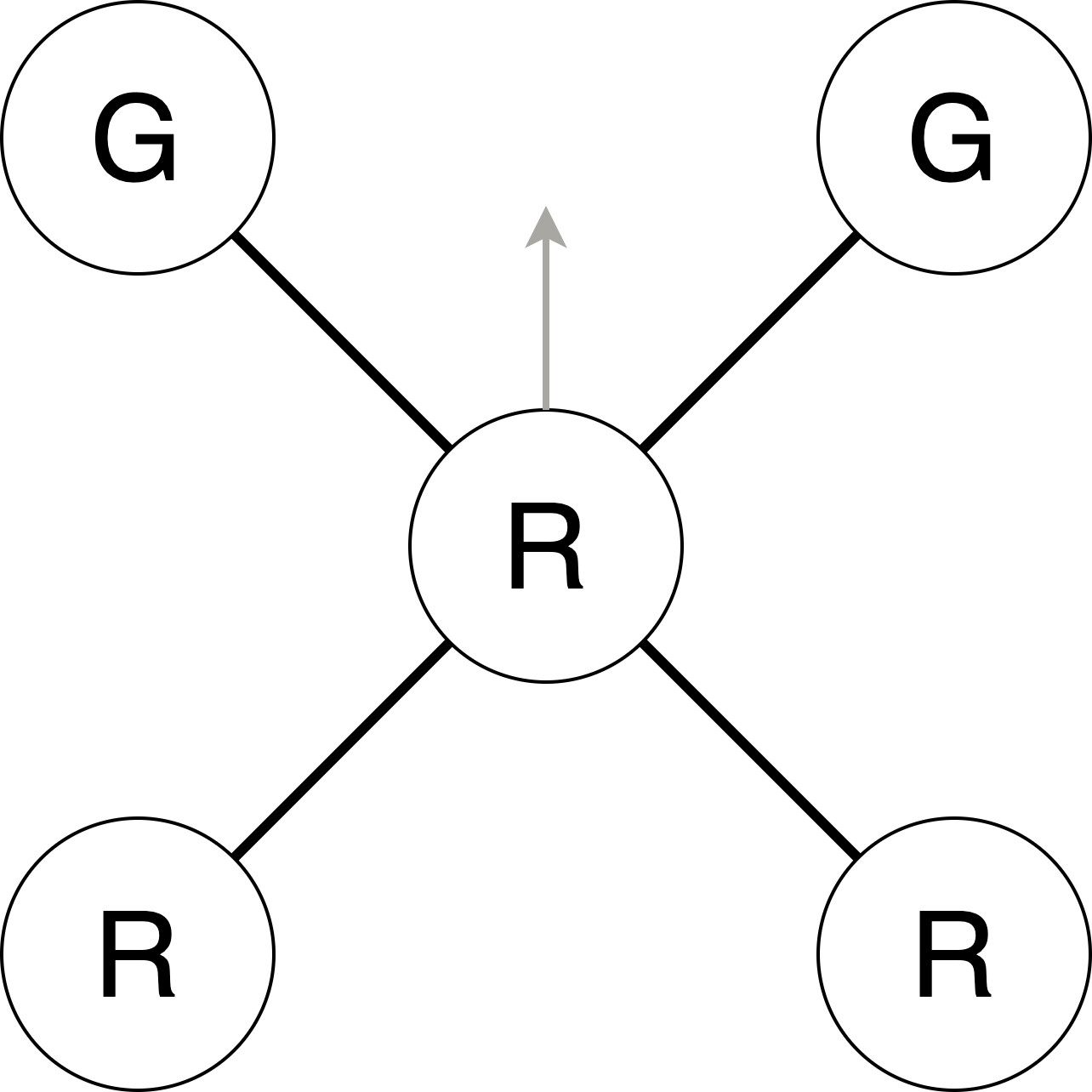
Fading | Ready for arming, in Attitude Mode Manual. |
 |
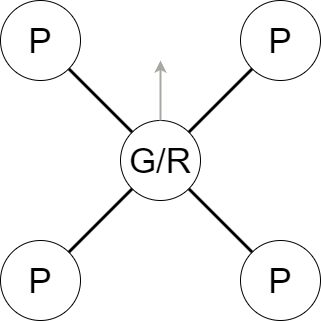
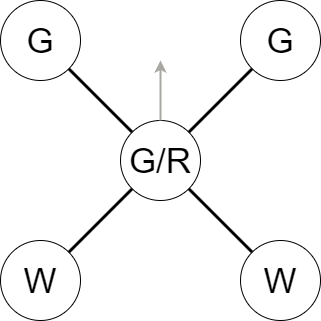
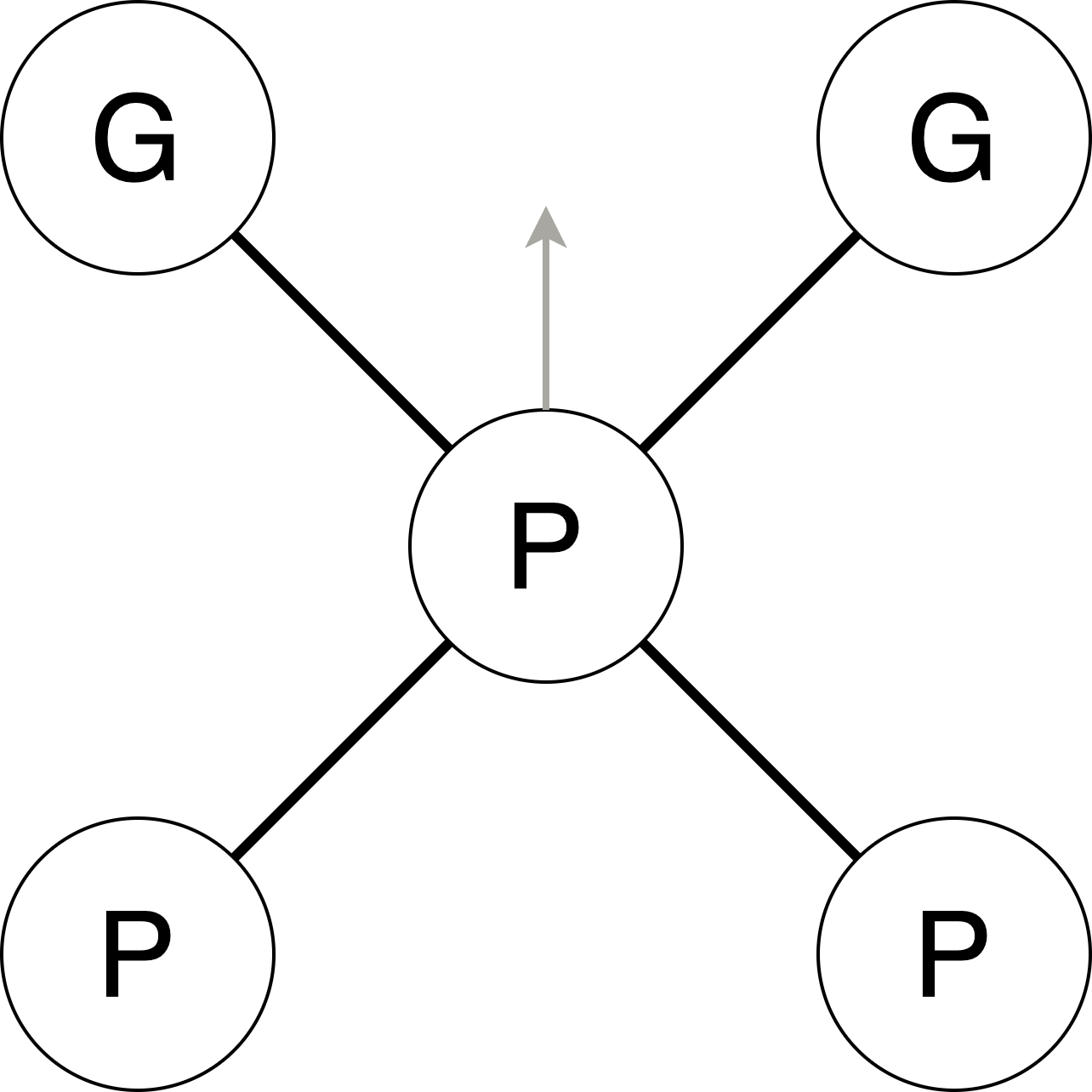
Fading | Ready for arming, in Position Mode Manual. |
 |
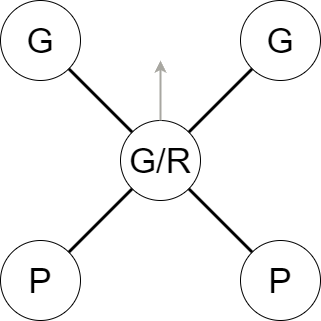
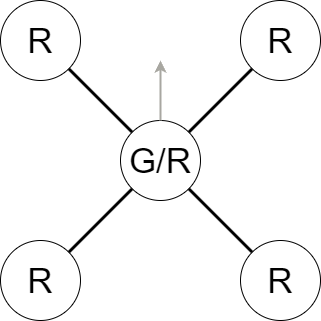
Fading | Ready for arming, in Automatic Position Mode. |
 |
Fading | Unsafe to start motors, check RC switch position and connection. Otherwise, potential sensor issues. |
|
Long/Short blink | Emergency stop state. Triggered after emergency landing or killed motors. Resolve why this state is triggered and reboot Vertex. |
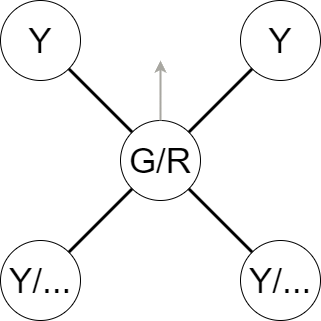 |
Fading | Pre-flight check failed. Check RC switch positions. If RC is requesting position mode, check if positioning sensors are available. Rear Navigation Lights are alternating between red and the current mode of operation colors. |
G = Green R = Red B = Blue Y = Yellow W = White P = Purple
Drone Armed
While Vertex One is armed, the Status Indicator and Navigation Lights are used to inform the pilot about the drone’s flight mode, flight mode changes, or other events potentially requiring the pilot’s attention.
On top of the indication to the pilot, the Navigation Lights are used as anti-collision lights as required by directive EU 2019/945. While Vertex One is in the armed state, there is a green strobe blink in between any other status indication to signal to the pilot, visual observers, and other aircraft for an active unmanned aircraft system.
| Indication | Pattern | Function |
|---|---|---|
 |
Solid | Attitude Mode manual |
 |
Solid | Position Mode manual |
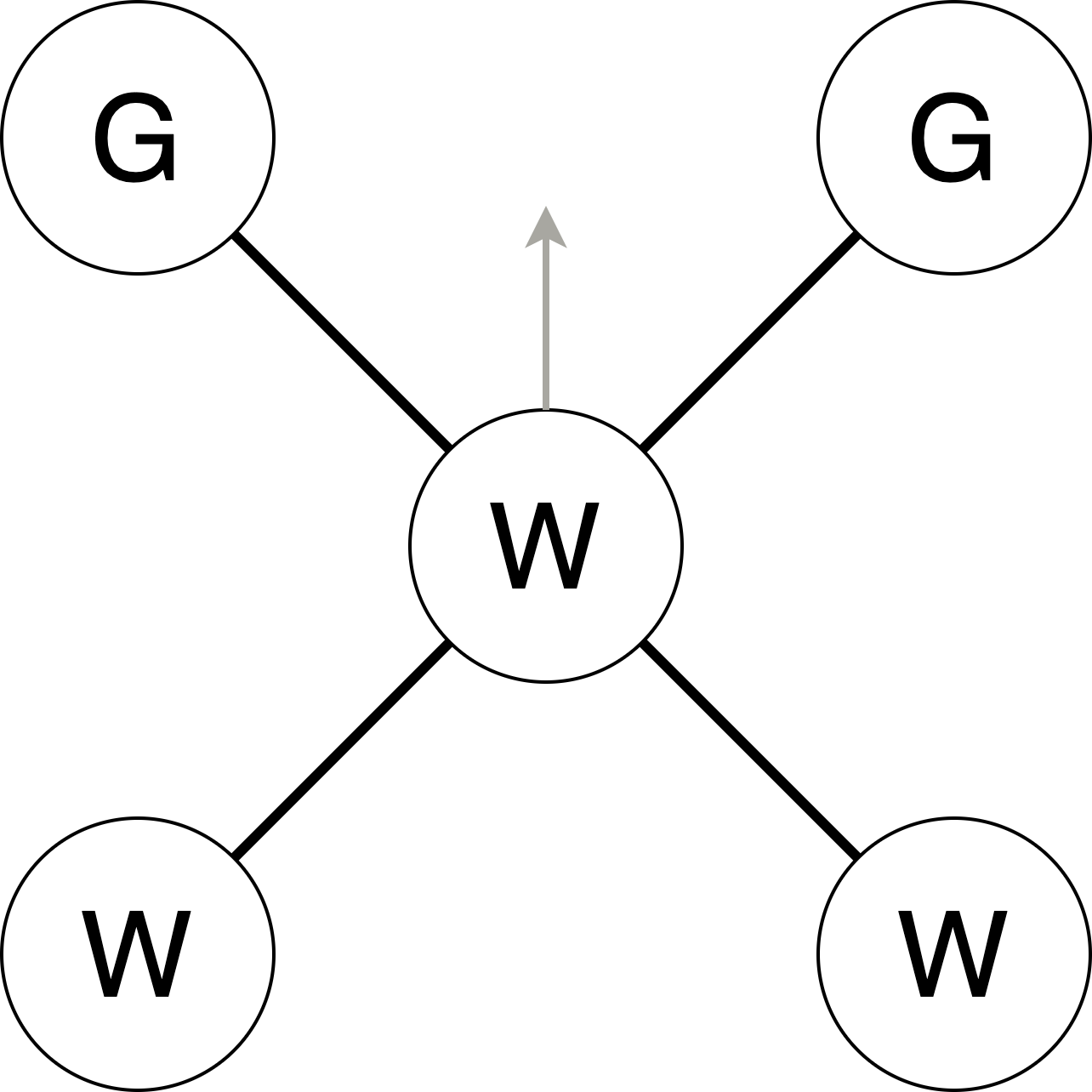 |
Solid | Automatic Position Mode |
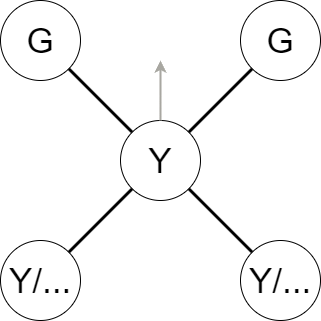 |
Blinking | Battery low or critical (<25%). Blinking alternately with the flight mode indication colors on the rear arms. |
 |
Fast Blinking | Emergency landing. Alternating blinking between yellow and red. |
G = Green R = Red B = Blue Y = Yellow W = White P = Purple