QGroundControl
Overview
The Vertex One Gen 4 uses QGroundControl as the primary ground control station (GCS) software. QGroundControl is an open-source ground control station for drones. It provides a user interface for mission planning, vehicle monitoring, and flight control. The telemetry data from the drone is displayed in real-time on the QGroundControl interface. You can monitor the drone's position, altitude, speed, and other flight parameters.
You can identify the QGroundControl app by the following icon:
![]()
Detailed information about QGroundControl can be found on the QGroundControl website.
Note
The Vertex One Gen 4 does not use all functions provided by the QGroundControl app. The next section describes the functions that are supported by the Vertex One Gen 4.
Vertex One Gen 4 QGroundControl functions
The following functions from the QGroundControl interface are supported by the Vertex One Gen 4:
Battery status
The battery status is shown in the top middle of the QGroundControl interface. The icon displays the percentage of battery remaining. The battery icon changes color based on the battery level. You can press on the battery icon to view more detailed information about the battery.
GPS status
The GPS status is shown in the top middle of the QGroundControl interface. The GPS icon displays the number of satellites that the drone is connected to. You can press on the GPS icon to view more detailed information about the GPS signal. When enough satellites are connected, the drone will be able to fly in position mode. When using the drone indoors or close to buildings, the GPS signal may be weak or lost. In such cases, the drone will not be able to fly in position mode.
Vehicle status
The vehicle status is displayed in the top right corner of the QGroundControl interface. The drone;s status can be one of the following:
- Disconnected: The drone is not connected.
- Not ready: The drone is connected but not ready to fly.
- Armed: The drone is ready to fly.
Telemetry
The telemetry data from the drone is displayed in real-time on the QGroundControl interface. The image below shows the telemetry data that is displayed in the main window of the QGC app:
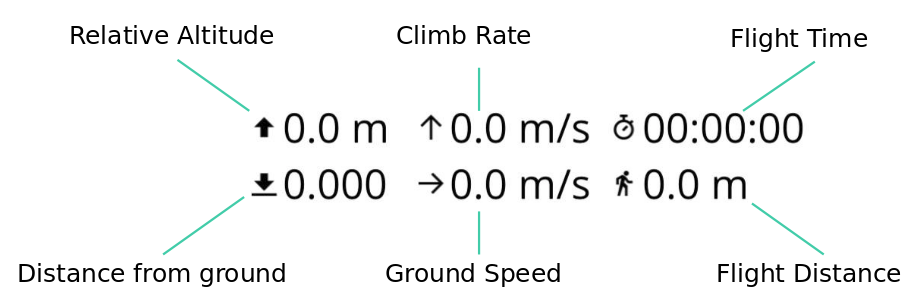
- Relative Altitude: The altitude of the drone relative to the location where the drone first initialized.
- Climb Rate: The rate at which the drone is climbing or descending.
- Flight Time: The total time the drone has been in the air.
- Distance from ground: The distance measured by the bottom Time-of-Flight sensor.
- Ground Speed: The speed of the drone relative to the ground.
- Flight Distance: The total distance the drone has flown.