Vertex One Gen 3 - Specification List
Vehicle
| Specification |
|
| Drone Type |
Multicopter X4, with foldable arms |
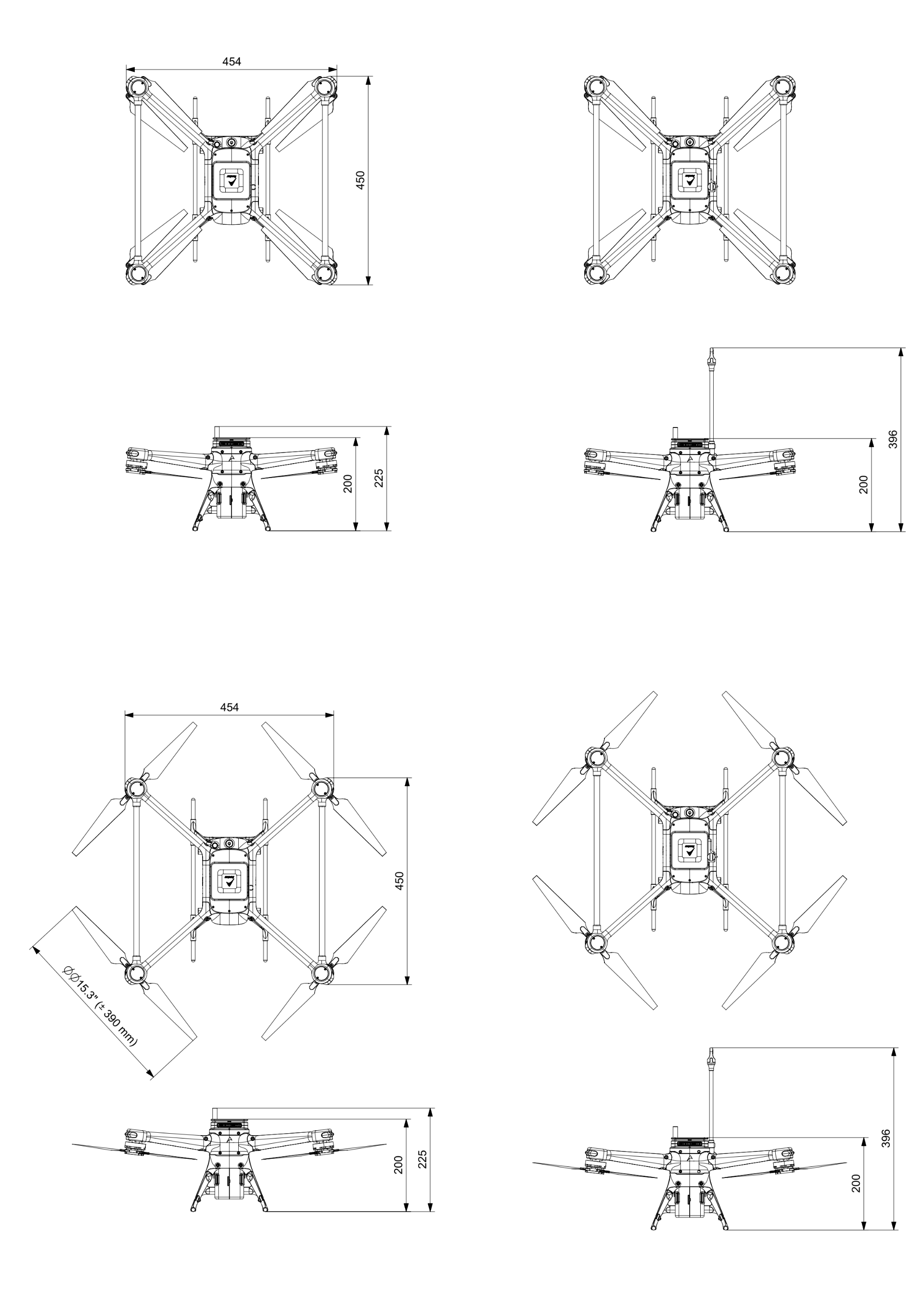
| Body Dimensions (LxWxH) - Flight ready (excl. propellers) |
450 x 454 x 245 mm (incl. GNSS antennas)
450 x 454 x 200 mm (w/o GNSS Antennas) |
| Body Dimensions (LxWxH) - Storage & Transport |
454 x 250 x 340 mm |
| Mass without Payloads with Batteries |
2800 g |
| Mass without Payloads without Batteries |
1710 g |
| Maximum Payload Mass |
1000 g |
| Maximum Take-off Mass |
3800 g |
| Ingress Protection |
Designed for IP4x |
| Operating Temperature |
0 - 40 °C |
Propulsion System
| Specification |
|
| Motors |
4 x Avular motor 380kv, Brushless DC |
| Propellers |
Avular - 15 Inch - Carbon - Foldable |
| Specification |
|
| Maximum Flight Time (Hover without payload) |
30 min |
| Maximum Horizontal Velocity (Position manual/Waypoint execution mode) |
7 m/s |
| Maximum Vertical Velocity (Position manual/Waypoint execution mode) |
3 m/s |
| Maximum Yaw Rate |
60°/s |
| Maximum Roll/Pitch Angle |
25° |
Battery
| Specification |
|
| Type |
Vertex One PowerPack (Included) |
| Battery Management System |
Avular BMS incl. Smart Protections |
| Cell type |
21700 Li-ion |
| Cell Configuration |
6S2P |
| Mass |
1090 g |
| Battery Redundancy |
Yes |
| Nominal Voltage |
21.6 V |
| Nominal Capacity |
8400 mAh |
| Total Energy |
182 Wh |
| Charger |
Vertex One Charger (Included) |
| Onboard Diagnostics |
State-of-Charge, State-of-Health |
Flight Controller
| Specification |
|
| Type |
Avular Prime (ARM Cortex-M7) |
| Operating System |
Avular Real-time OS (ArtOS) |
| Programming Port |
1 x USB-C |
Onboard Computing Unit
| Specification |
|
| Type |
NVIDIA Jetson Orin NX |
| RAM Capacity |
16 GB |
| Internal Storage |
512 - 4000 GB |
| Operating System |
Linux Ubuntu OS |
| External Connectivity |
2 x USB 3.2 (USB-C 10Gb/s)
1 x RJ45 Gigabit Ethernet
WiFi (5GHz only) |
User Interface
| Specification |
|
| Remote Controller Type |
JETI DS-12 |
| Remote Controller Operating Frequency |
2,4 GHz |
| Remote Controller Range |
Up to 1 km |
| Indication Lights |
1 x RGB (on the drone body) |
| Navigation Lights |
4 x RGB (on the drone arms) |
| Desktop Software |
Cerebra Software Suite |
Onboard Sensors
| Specification |
|
| Position |
1 x (RTK) GNSS (GPS, Glonass, BeiDou, Galileo)
Note: RTK base station is sold seperately |
| Inertial Attitude Measurement |
4 x 6-axis IMU (redundant) |
| Heading Measurement |
1 x Internal Magnetometer + 1 x External Magnetometer |
| Altitude Measurement |
2 x Barometer + 1 x IR Time-of-Flight |
| Specification |
|
| Electrical Interfaces |
Stated above
Note: Additional electrical interfaces available using Vertex One Bridge (Sold Separately) |
| Mechanical Interfaces |
Pre-defined Mechanical Interfaces (Drawings and 3D Models available) |
| Software Tools & Interfaces |
Avular Programming Interface (ROS2 Based)
Dockerized Environment |
| Development Documentation |
Freely available online |
Compatible Payloads/Accessories (Sold Separately)
| Specification |
|
| Visual Camera Payload |
13MP RGB Camera (Manually Pitch-Adjustable Mount) |
| Depth Camera Payload |
Intel RealSense D435 (Fixed Mount) |
| Navigation & Positioning |
Avular Stellar RTK GNSS Base Station |
| Specification |
|
| Vertex One Bridge |
Interfaces: 1 x USB-C 3.2 (10 Gb/s), 1 x CAN, 1 x I2C, 2 x UART, 1 x GNSS timepulse, 1 x GPIO
Total Rated Power Output: 36 W (Shared between outputs 12V/3A and 5V/2A) |
Packaging
| Specification |
|
| Packaging Type |
Heavy-Duty Travel Case |
Dimensions
Disclaimer
Should you find incorrect or missing specification, please contact us.
Legal Disclaimer applies to all hereinbefore presented information.