Depth Camera Payload
Introduction
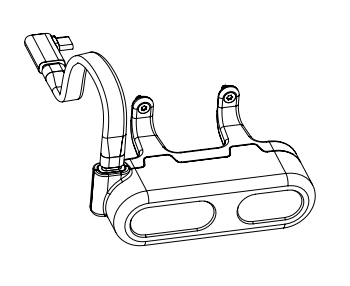
The Depth Camera Payload for Vertex One is a standard payload option that provides an Intel® RealSense™ depth camera D435i (Version including internal IMU). By using the stereoscopic depth sensing capabilities of the D435i and its integrated inertial measurement unit (IMU) data, the combined set of data allows for more accurate world reconstruction. Additionally, the IMU data of Vertex One might be used to further improve this accuracy.
On top of this data reconstruction capability, alternately, the data can be easily used for drone localization so that it understand its position in the three-dimensional world.
Specification List
Original specification list can be found here (External Link)
Integration Guides
| Hardware Integration | Software Integration | Available Downloads |
|---|---|---|
 |
 |