Coordinate Frames
Introduction
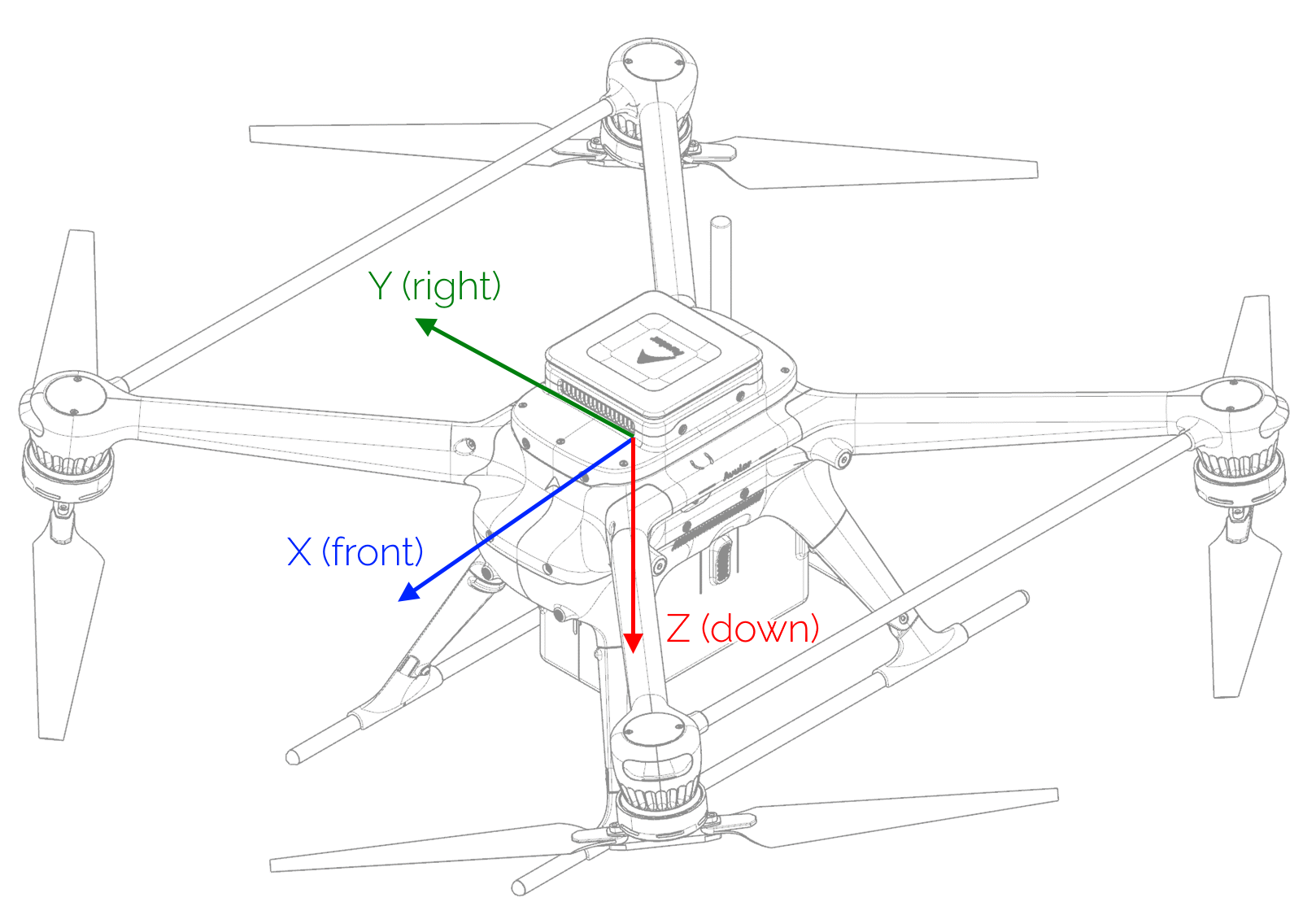
The flight controller follows North-East-Down (NED) / Front-Right-Down convention for its reference frames (Vertex One body frame and World frame)
The Vertex One's Body Frame
- Frame origin is at the center of Mass of the drone
- X-axis is oriented towards the front of the drone (Notice that Power On/Off button is at the back of the drone)
- Y-axis is oriented towards the right-hand side of the drone
- Z-axis is oriented downwards
The World Frame
The origin of the world frame (or 'odom NED' frame) is set to zero where GNSS initializes. The heading is w.r.t north with a positive rotation clockwise (north to east) in accordance with the NED frame definition.
Implementation of the Reference Frames
Below is an overview diagram of the reference frames as implemented on Vertex One:
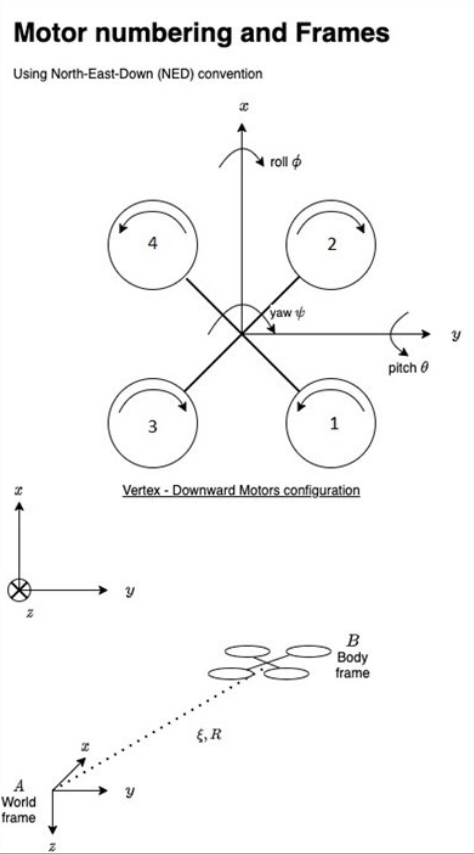
All position estimates and references as well as heading in the flight controller are in the world frame.
The roll and pitch angles are defined in the body frame.